弘前大学技術
整理番号:K23-019_K23-028
自動注射装置
完全非接触な自動穿刺ロボットの実現へ!
概要
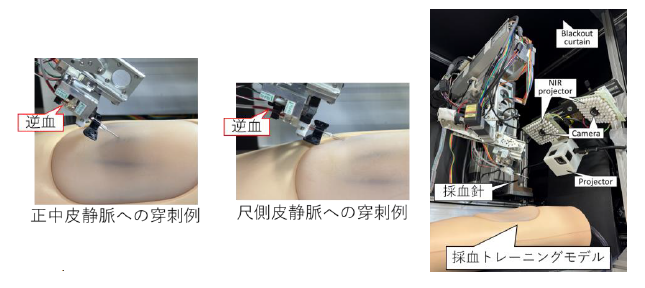
今日の臨床医療において、採血は病気の診断や治療を行うために頻繁に行われており、医療従事者不足の問題が指摘されている。また、臨床医でも肉眼で血管を見つけることが難しい患者もおり、施術に失敗するリスクがあるほか、針刺し事故や血液接触による感染症といった重大な問題も抱えている。これらの問題を解決するためには、ロボットによる採血の自動化が有効であると考えられる。
これまで様々な採血ロボットの研究が進められているが、多くの自動穿刺ロボットには超音波画像診断装置が使用されている。感染症の拡大を予防することを考えると、できるだけ患者と非接触で血管位置を推定し、自動穿刺を実現することが理想的である。
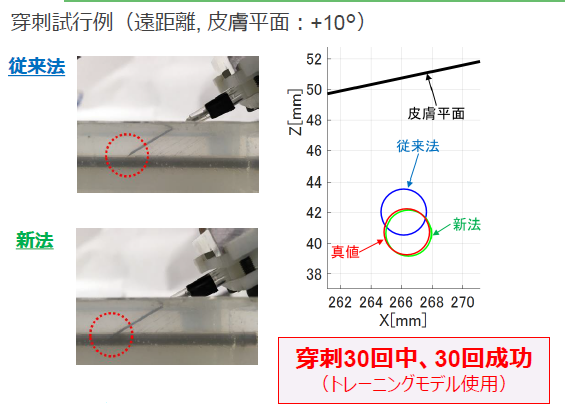
本発明は、2台の赤外線カメラを使った完全非接触な三次元血管位置の特定方法に関する。カメラの視線方向による屈折の違いを考慮することで、血管位置を高い精度で特定することが可能となった。
性能・特徴等
応用例
・血管位置特定装置(ヒト・動物)
・自動採血ロボット
関連文献
[1]佐川 貢一,藤本 拓人,小出 達哉,長井 力,日本機械学会論文集Vol.89, No.917, 2023
知的財産データ
知財関連番号 : 特許第6532042号、特願2021-106414
発明者 : 佐川 貢一、長井 力、遠藤 善生
技術キーワード: 穿刺ロボット、自動穿刺、自動採血