東北大学技術
整理番号:T20-029
可変剛性連結体
自ら形状を変化し、小さい力で高剛性状態を保持することが可能
概要
従来、外力を与えたときに変形しやすい柔軟な状態と、接触時に外部に力を伝えることが可能な高剛性の状態とを切り替える機構が研究されている。また、その機構を利用して対象物を把持するグリッパが提案されている。グリッパの種類は多岐にわたり、複数の連結部材を一列に並べて互いに回転できるように連結して成るもの、ワイヤに通して一列に並べられた数珠から成るものなどある。しかし長尺化すると、摩擦による力の損失で高剛性状態にするのが困難になったり、自ら形状を変化させることができなかったりするという課題があった。
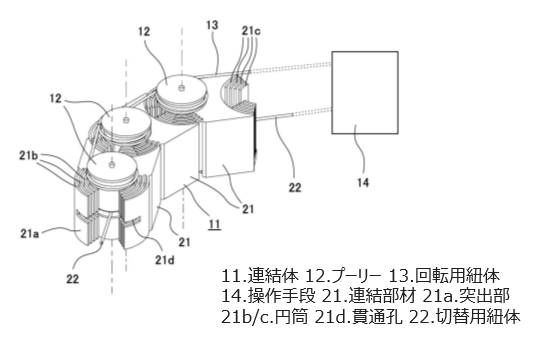
本発明は、このような課題に着目してなされたもので、自ら形状を変化させることができると共に、比較的小さい力で高剛性状態を保持することができる可変剛性連結体を提供することが可能となった。本発明は、一列に並べて連結された複数の連結部材にプーリーが設けられ、各プーリーに回転用紐体を有し、連結部材の固定状態と回転状態の切替が可能になるよう構成されている。本発明では、連結体を固定状態にして高剛性状態を保持するための力を小さくすることができるため、比較的小さい力で対象物を把持し続けることができる。
可変剛性連結体の構成図
応用例
・グリッパ(ロボットハンド)
・工作機械
・管内の検査装置
知的財産データ
知財関連番号 : 特開2021-186889
発明者 : 多田隈 建二郎、向出 陸央、恩田 一生、渡辺 将広、昆陽 雅司、田所 諭
技術キーワード: ロボット