東北大学技術
整理番号:T20-156
センサユニットおよびセンサ
外部から加わる様々な向きの力を検出
概要
現在、生産労働人口減少の問題を解決するために多くの産業分野でロボットの導入が進んでいる。今後ロボットがヒトと同様の作業をするためには、視覚以外の感覚 (力覚、圧覚、温覚、冷覚など)のセンサをロボットが持つことが重要になる。そのために、物体に作用する力などを測定するセンサとして微小電気機械システム技術を用いた小型で高感度なセンサの開発が進んでいる。しかし現在の技術では、外部からの力の向きによっては、印加された力を十分検出することができないという課題があった。
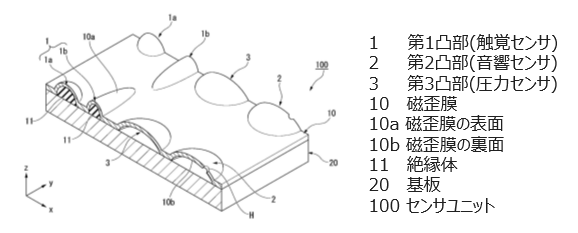
本発明によって、外部から加わる様々な向きの力を検出することのできるセンサユニットおよびセンサを提供することが可能になった。また、1つの素子で様々な情報を得ることのできるセンサユニットも提供することができる。本発明は、基準面に対して第1方向に対して突出する複数の凸構造の立体形状センサを有する連続した磁歪膜を用いることで、外部から加わる様々な向きの力を検出することが可能となる。
多機能センサとしてロボット等への応用が期待
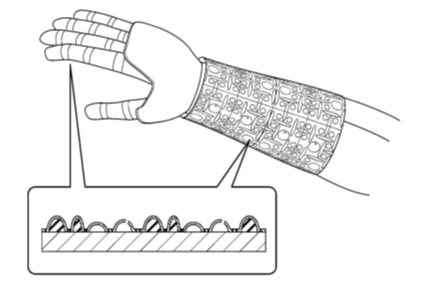
応用例
・医療・介護・介助
・ロボット、ロボットアーム
関連文献
公開論文なし。改良技術多数につき、詳細はお問合せ下さい。
知的財産データ
知財関連番号 : 特開2022-23720
発明者 : ヨーク・フロメル、室山 真徳、ジルダス・ディゲ、大髙 剛一
技術キーワード: 制御、計測、機械、エレクトロニクス、情報・通信(ハードウエア)