東北大学技術
整理番号:T21-111
2方向駆動装置
バックラッシュを低減し、出力精度を高めることが可能
概要
従来、ロボットアームの関節などの駆動機構として、1つの関節で複数方向への駆動を可能にするために、コニカルギアなどを用いた駆動装置が開発されている。このような駆動装置を利用することにより、ロボットアームの関節等の小型化や高機能化を図ることができる。
しかし、回転方向を変換する際に歯車を用いているため、バックラッシュにより出力に誤差が生じてしまうという課題があった。
また、小型化すると、大きいトルクを伝達するのが困難になるという課題もあった。
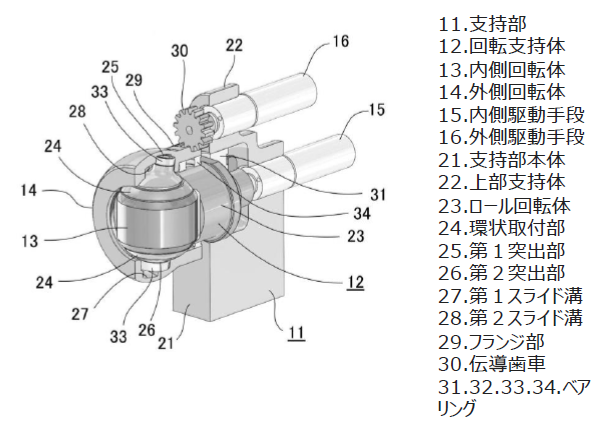
本発明によって、バックラッシュを低減して出力精度を高めることができ、小型化しても比較的大きいトルクを伝達することができる2方向駆動装置を提供することが可能になった。本発明は、支持部と、
回転支持体と、複数の突出部を有し、各突出部の先端部がスライド移動することにより、内側回転体が回転するよう構成されていることを特徴とする。この構造によって、バックラッシュを低減して出力精度を高めることができ、小型化しても比較的大きいトルクを伝達することができる2方向駆動装置を提供することができる。
突出部先端のスライド移動によって出力精度を高める
応用例
・ロボット
・ロボットアーム
知的財産データ
知財関連番号 : 特開2023-037679
発明者 : 阿部 一樹、多田隈 建二郎
技術キーワード: Wheel、crawler、caster