未知の形状を把持できるグリッパ
対象物の形状に馴染んで変形する把持機構
概要
惑星・洞窟・火山などの極限環境を探査するためのロボット開発が進められている。このような環境では、地形を事前に調査することが難しいため、未知の不定形な地表を移動できるロボットが求められている。また、昨今の人手不足により、工場や倉庫における作業を機械化する需要も大きい。人の手で行う作業を機械化するためには、1つの機構で様々な物体を把持できるロボットハンドが求められている。以上2つのニーズのように、未知の形状を把持できるグリッパが実現できれば、大きな需要があると想定される。
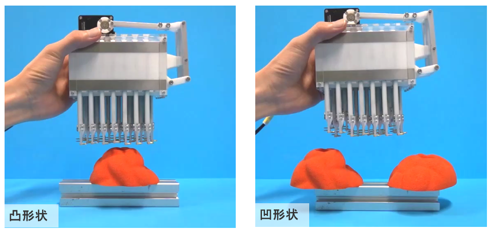
本発明は、対象物の形状に馴染むことで、未知の形状を把持できるグリッパに関するものである。本機構の最大の特徴は、通常のグリッパでは把持できない凹形状についても、ピンが馴染んで把持できることである。さらに、凸形状と凹形状のどちらも、モータ1つのみを用いて同じ動作により把持できるなど、簡単な構成であることも利点である。なお、関連文献2では、実際に本機構が物体を把持する動画を視聴できる。
性能・特徴等
応用例
・惑星・洞窟・火山などを探査するロボット
・工場や倉庫における産業用機械
・土木建設用機械
・農業用機械
・未知形状の計測機・計測サービス
・その他、未知形状の把持や探査が必要である、種々の用途
関連文献
1.T. Kato, K. Uno, K. Yoshida, Proc. IEEE ROBIO, pp. 1365–1370, 2022, DOI: 10.1109/ROBIO55434.2022.10011858.
2.2023年7月11日東北大学新技術説明会「さまざまな凹凸形状をつかめるピン配列型把持機構」発表資料
3.東北大学研究シーズ集「さまざまな凹凸形状をつかめるピン配列型把持機構」
知的財産データ
知財関連番号 : 国際公開番号WO2023/233468
発明者 : 加藤 匠哉、宇野 健太朗
技術キーワード: ロボット、把持機構