東北大学技術
整理番号:T22-345
不整地も平地も移動可能なエンドエフェクタ
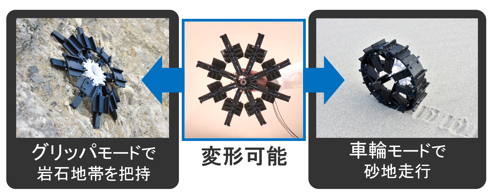
グリッパと車輪の2つのモードを持つ変形機構
概要
惑星探査や被災地の被害情報収集を行うロボットは、急斜面や凹凸面等の不整地にも、平坦な地形にも、どちらにも対応できる必要がある。しかし、不整地と平地両方の移動効率を向上させることは難しい。例えば、急斜面を掴んで登攀できるロボットは平坦な地面の移動効率が悪く、平坦な地面を車輪で移動できるロボットは急斜面や凹凸面の移動に適していない。
本発明は、不整地を走行する際はグリッパとなり、平地を走行する際は車輪となる、エンドエフェクタに関するものである。本エンドエフェクタをロボットに適用することで、不整地でも平地でも移動効率の高いロボットが実現できる。

性能・特徴等
応用例
・惑星を探査するロボット
・洞窟や火山等の極限環境を探査するロボット
・被災地の被害情報を収集するロボット
・その他、不整地・平地のどちらも移動するような、種々の用途
関連文献
1.宇田 昌弘,澤 健太,宇野 健太朗,Li Zheng Travis Lim,吉田 和哉,“車輪-グリッパ間変形可能機構の開発と把持性能評価”,日本ロボット学会誌,2023. (採択済み)
知的財産データ
知財関連番号 : 特願2023-102850
発明者 : 宇田 昌弘、澤 健太、加藤 匠哉、宇野 健太朗
技術キーワード: ロボット、車輪機構、グリッパ機構