東北大学技術
整理番号:T24-072
内視鏡治療用牽引システム
牽引ロボットによる安全な病変切除手術
概要
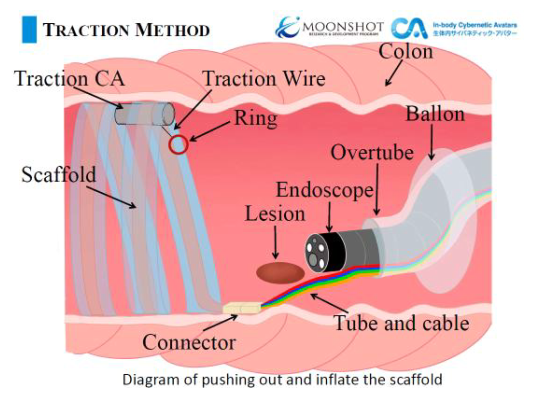
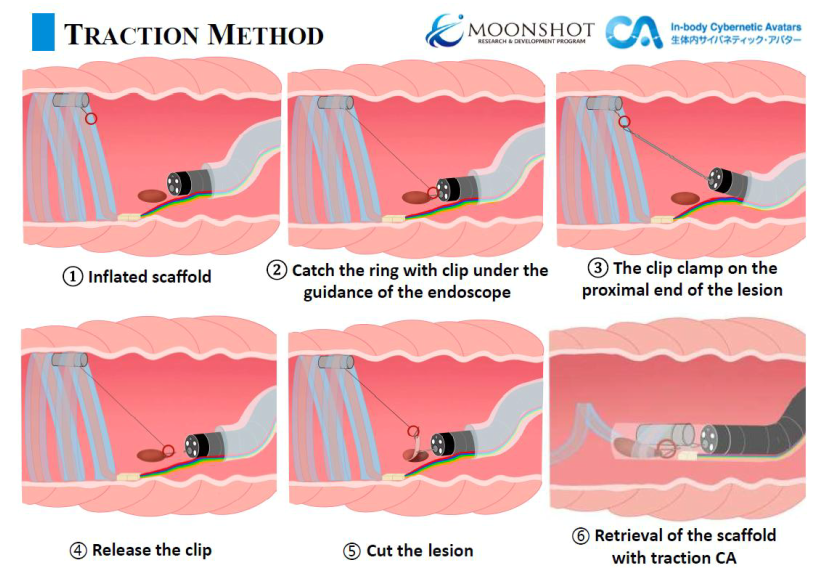
内視鏡的粘膜下層剥離技術(ESD)は病変を一括切除が可能な手法であるが、手術難易度が高い。特に視野が狭かったり粘膜下層への潜り込みがスムースにできない症例では、高度な熟練技が要求される。従来、弾性部材に接続されたクリップ等で病変部を挟み牽引することで、剥離面の視野の確保や潜り込み操作を軽減する手法がある。しかし、内視鏡を介して把持部材を適切に装着することは容易ではなく、複数の処置具の操作に煩雑な手間を要するという課題があった。
本発明は、適切な力で病変部を牽引することで、切除手技を安全かつ確実に行う牽引ロボットに関する発明である。牽引ロボット内部には電磁モーターと病変部を牽引するワイヤーを有し、力センサーを搭載することで牽引力を計測しフィードバック制御を可能とする。また、生体内で牽引部を固定する足場を備えることで、より安全かつ高精度に牽引力を検出できる。
性能・特徴等
応用例
・内視鏡的粘膜下層剥離術(EDS)
関連文献
[1] X. Gao, N. Tsuruoka, W. Liu, Y. Sakaguchi, Y. Tsuji, M. Fujishiro, F. Arai, and Y. Haga, Sensors and Materials, Vol. 38, No. 1, (2026), pp.71-88知的財産データ
知財関連番号 : PCT/JP2025/040798
発明者 : 芳賀 洋一、鶴岡 典子、GAO XINCHI、劉 温鋭
技術キーワード: 内視鏡的粘膜下層剥離術、EDS