東北大学技術
整理番号:T21-217_T20-3132
高機能・高性能なハンド、グリッパ
ハンド、グリッパ、把持機構に関する技術群を提供
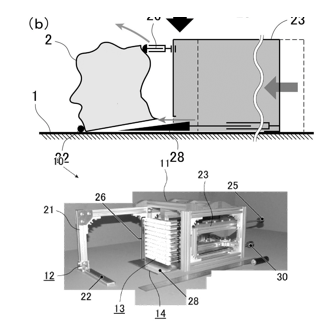
把持しにくい物でも移動可能な運搬装置
把持しにくい形状の対象物であっても移動可能であり、移動中に対象物に力をかけることなく移動させることが可能な機構。
(知財関連番号:特願2021-201325、整理番号:T21-217)
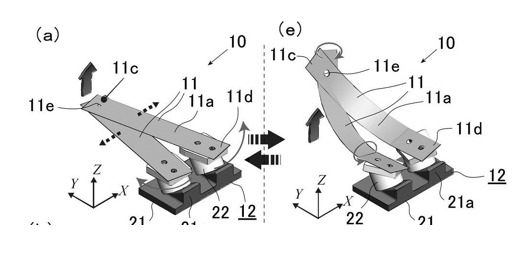
薄型のまま、高剛性なハンド
薄型のままで剛性を高めることができる変形機構を利用したハンド・把持機構。
(知財関連番号:特願2021-082469、整理番号: T20-3132)
知的財産データ
知財関連番号 : 上記各技術参照
発明者 : 多田隈 建二郎 ら
技術キーワード: Hand、Gripper